目录
简介
初识list
模型
list容器的优缺点
list的迭代器
常用接口介绍
获取迭代器
begin
end
empty
size
front
back
insert
push_front
pop_front
push_back
pop_back
clear
源代码思路
节点设计
迭代器的设计
list的设计
begin()
end()
空构造
insert()
push_back
模拟实现
节点设计
迭代器设计
list设计
框架
获取迭代器
空构造
insert
erase
赋值重载
其他接口
简介
C++的STL有六大组件:仿函数, 空间配置器, 算法, 容器, 迭代器,配接器。list属于容器的一种。
list的设计使用了模板,是一种泛型编程。
初识list
模型
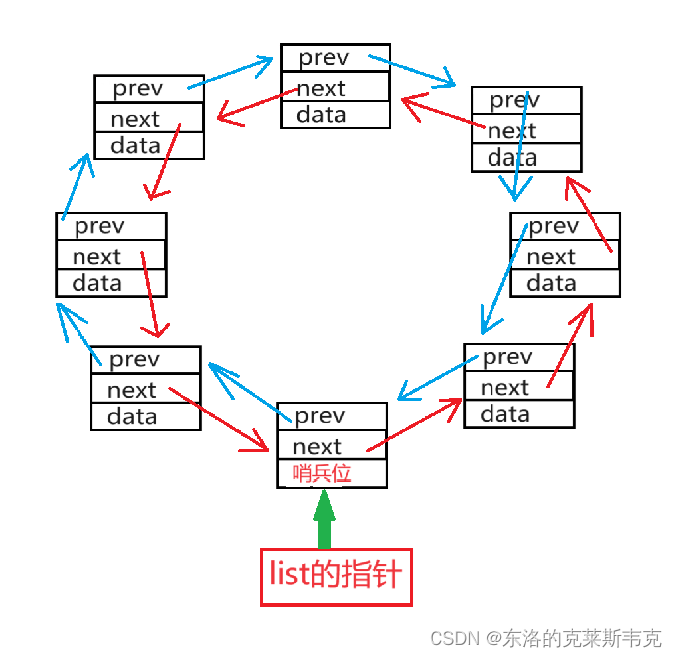
list是带哨兵位的双向循环链表。
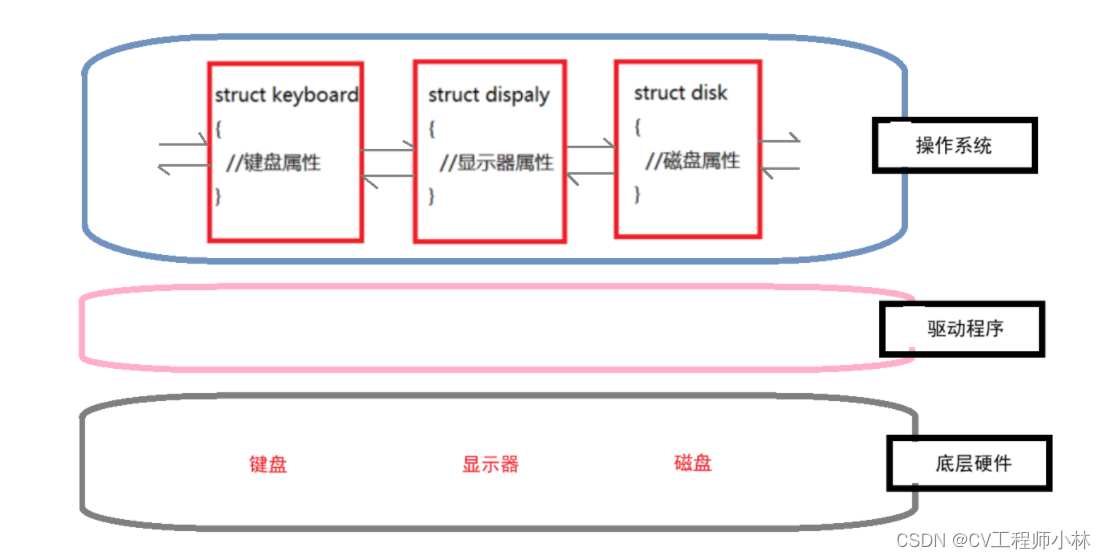
链表是由一个一个的节点通过指针链接起来的。list的节点设计:prev指针指向前一个节点,next指针指向下一个节点,data储存数据。如下图

而list想要实现双向循环链表,只需用一个指针指向不储存数据的节点——哨兵位节点或头节点。让哨兵位节点将整条链表首尾相连。哨兵位的next是链表的头节点,哨兵位的prev是链表的尾节点,如下图
list容器的优缺点
优点:头部插入,头部删除,尾部插入,尾部删除的时间复杂度位O(1)。list的指针是一直指向哨兵位节点的,通过哨兵位节点能找到链表的头节点和尾节点,从而实现头插,头删,尾插,尾删操作。
缺点:对链表中的数据进行排序的时间复杂度会很高。找链表中的某一个数据时,需要遍历链表。
list的迭代器
list的每个节点在内存中储存不是连续的。
普通的指针不能完成对链表的遍历——加加指针不能使指针指向下一个节点,减减指针不能使指针指向上一个节点。指针的解引用不能完成对数据存取——普通指针解引用是整个节点,而不是节点里存的数据。
所以不能用普通指针做list的迭代器。应该对普通指针进行封装,将封装之后的普通指针作为list的迭代器。该迭代器能完成链表的遍历,数据的存取等操作。
具体怎样封装,下面介绍源代码思路和模拟实现时会详细讲解
迭代器失效:把迭代器指向的节点删除掉,会让该迭代器失效,类似于野指针的问题。在迭代器指向节点的前面或后面插入节点,不会使迭代器失效。
常用接口介绍
获取迭代器
begin

| 返回哨兵位前一个节点的位置 |
end

| 返回哨兵位节点的位置 |
empty

|
检测list是否为空,是返回true,否则返回false
|
size

|
返回list中有效节点的个数
|
front

|
返回list的第一个节点中值的引用
|
back

|
返回list的最后一个节点中值的引用
|
insert

|
在list的 position 迭代器指向的节点之前插入值为val的节点,返回新插入节点的迭代器
|
push_front

| 在链表的头部插入一个值为val的节点 |
pop_front

| 删除头部位置的节点 |
erase

| 删除position迭代器指向的节点,或删除从first到last迭代器区间的节点,返回下一个位置的迭代器 |
push_back

| 在链表的尾部插入值为val的节点 |
pop_back

| 删除最后一个节点 |
clear

| 删除所有有效节点 |
源代码思路
下面内容参考侯捷老师的《STL源码剖析》
源代码中涉及空间配置器的部分不做重点讲解,只需知道空间配置器是为了给节点list申请空间的即可。
小编摘抄部分源码,带大家了解list设计的大概框架。具体实现的细节在模拟实现时讲解
节点设计
template <class T>
struct __list_node
{
typedef void* void_pointer;
void_pointer* prev;
void_pointer* next;
T data;
}struct在C语言中是结构体,在C++中是类。用struct封装不加访问限定符默认成员是公有的。迭代器和链表需要访问节点的数据,设计成共有是为了方便访问。设计成私有需要声明友元。
prev和next的指针是void*类型是因为不知道数据的类型,源码在实现其他接口时会把void*进行强转。和下面代码的设计是等价的
__list_node<T>* prev; __list_node<T>* next;
data是用来储存数据的
迭代器的设计
template <class T, class Ref, class Ptr>
struct __list_iterator
{
typedef __list_iterator<T, T&, T*> iterator;
typedef __list_iterator<T, Ref, Ptr> self;
typedef T value_type;
typedef Ptr pointer;
typedef Ref reference;
typedef __list_node<T>* link_type;
link_type node; //节点指针 核心数据
//运算符重载,为了让node能像普通指针一样
//解引用重载
reference operator*()const //Ref
{
return (*node).data;
}
//->运算符重载
pointer operator->() const //Ptr
{
return &(operator*());
}
//++运算符重载.....
//--运算符重载....
//==运算符重载....
//......
}成员全部共有,方便list访问
Ref和Ptr两个模板参数是为了区分普通迭代器和const迭代器,如下代码
typedef __list_iterator<T, T&, T*> iterator; //迭代器别名
typedef __list_iterator<T, const T&, const T*> const_iterator; //const迭代器别名如下图
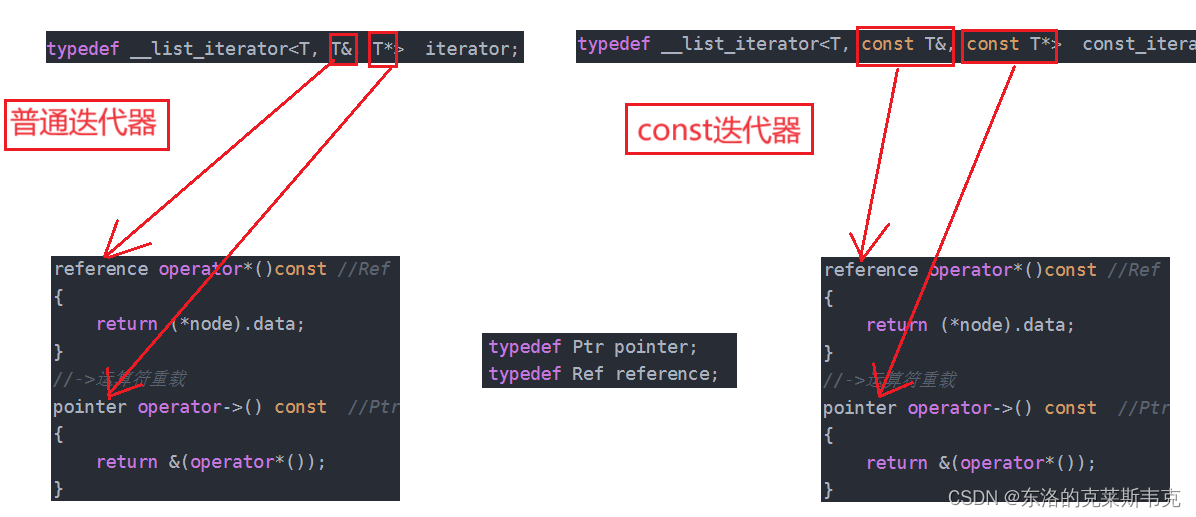
node是节点的指针,是核心数据。在迭代器这个类中,重载了* -> ++ -- == != 运算符是为了让结点指针能像普通指针一样,完成对链表的遍历和对数据的存取。这便是封装的魅力。
list的设计
template <class T, class Alloc = alloc>
class list
{
protected:
typedef __list_node<T> list_node;
public:
typedef list_node* link_type;
protected:
link_type node;
}上文已经提到,只需用一个节点指针node指向哨兵位节点,便可以通过迭代器对整条链表增删查改。
begin()
iterator begin()
{
return (link_type)((*node).next);
}获取哨兵位节点的下一个指针next,但next是void*类型的指针,需要强转成节点类型的指针
end()
iterator end()
{
return node;
}获取尾节点的下一个节点的指针——哨兵位节点指针
空构造
void empty_initialize()
{
node = get_node(); //为哨兵位开空间
node->next = node; //没有有效节点,首尾指针都指向自己
node->prev = node;
}
list()//构造函数,构造空链表
{
empty_initialize();
}list是允许构造空链表的
详解构造函数:http://t.csdnimg.cn/Iu0t4
insert()
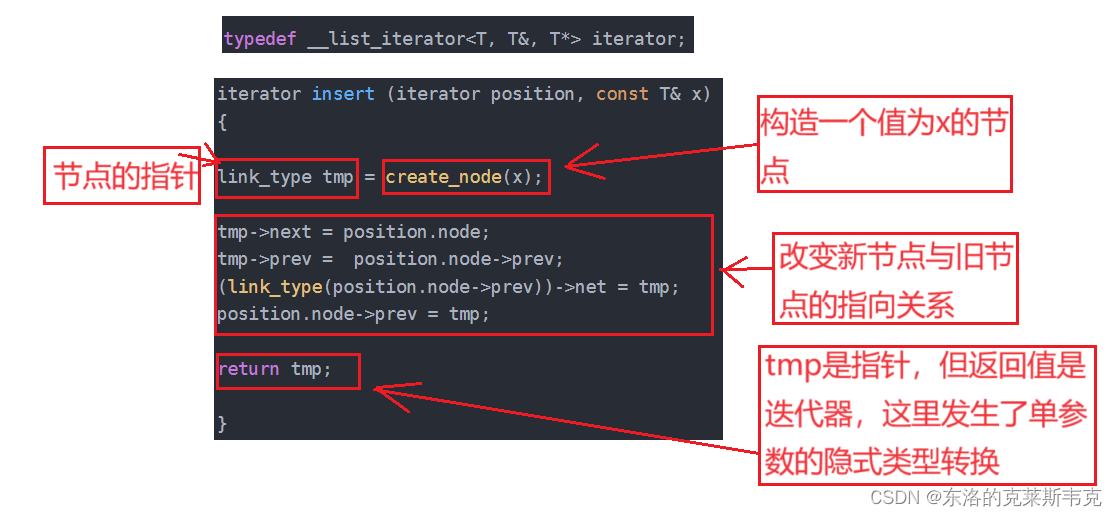
iterator insert (iterator position, const T& x)
{
link_type tmp = create_node(x);
tmp->next = position.node;
tmp->prev = position.node->prev;
(link_type(position.node->prev))->net = tmp;
position.node->prev = tmp;
return tmp;
}上述代码中有经过封装的函数。但大致思路如下图
隐式类型转换:http://t.csdnimg.cn/jBT7I
push_back
void push_back(const T& x)
{
insert(end(), x);
}复用insert
模拟实现
目的:源代码的变量经过了嵌套的typedef,函数经过层层封装。用源代码理解list的实现细节和运行机制并不容易。用源代码的的框架和实现思路实现一个简易的list,帮助我们更好的理解list。
模拟实现是用new和delete,管理list的内存。详见内存管理一文:http://t.csdnimg.cn/byO3P
节点设计
template <class T>
struct __list_node
{
T* prev;//指向前一个节点
T* next;//指向后一个节点
T data;//储存数据
__list_node(const T& val = T()) //构造函数
:prev(nullptr)
, next(nullptr) //参数列表
, data(val)
{
}
};迭代器设计
template <class T, class Ref, class Ptr> //封装指针
struct __list_iterator
{
typedef __list_iterator<T, Ref, Ptr> self; //迭代器别名
typedef __list_node<T> list_node; //节点别名别名
list_node* p_node; //节点指针
__list_iterator(list_node* val)
:p_node(val)
{
};
T operator*()//解引用重载
{
return p_node->data;
};
Ref operator*()//解引用重载
{
return p_node->data;
};
T operator->()
{
return &p_node->data;
}
Ptr operator->()
{
return &p_node->data;
}
self& operator++()//加加运算符重载
{
return p_node->next;
};
bool operator!=(const self val)//不等于运算符重载
{
return p_node != val.p_node;
};
bool operator==(const self val)//等于运算符重载
{
return p_node == val.p_node;
};
};list设计
框架
template <class T>
class list
{
typedef __list_node<T> list_node; //节点指针别名
typedef __list_iterator<T, T&, T*> iterator; //迭代器别名
typedef __list_iterator<T, const T&, const T*> const_iterator; //const迭代器别名
public:
//接口......
private:
list_node* head_node;//头节点,只要一个指针便可代表整个链表
};获取迭代器
iterator begin()
{
return head_node->next;
}
const_iterator begin()
{
return head_node->next;
}
iterator end()
{
return head_node;
}
const_iterator end()
{
return head_node;
}空构造
void empty_init()
{
head_node = new list_node;
head_node->_prev = head_node;
head_node->_next = head_node;
}
list()
{
empty_init();
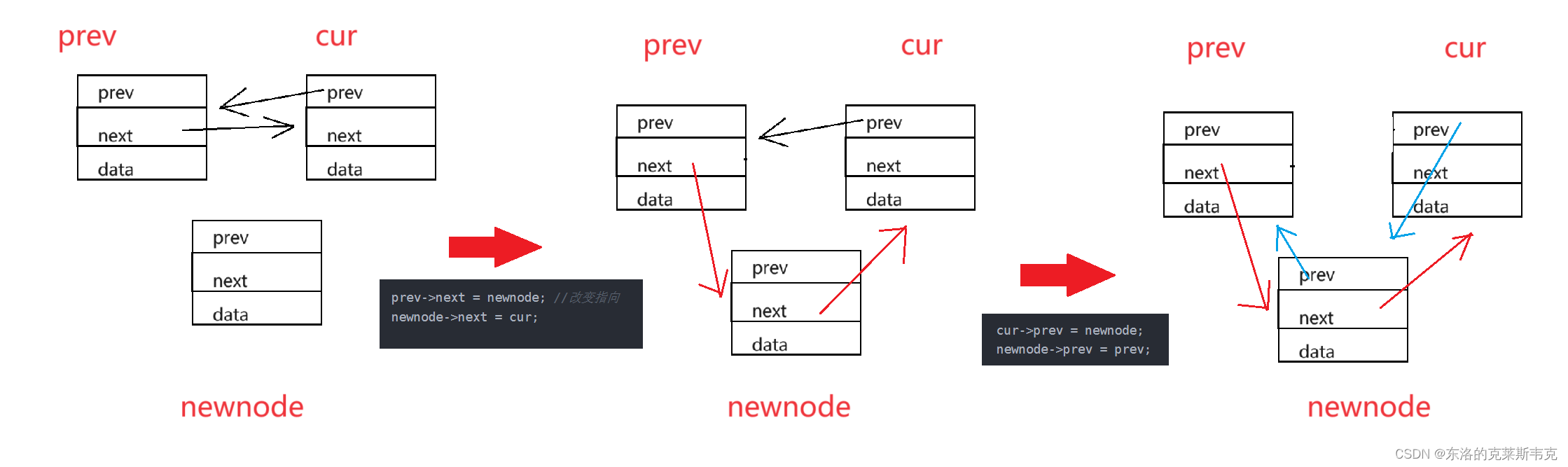
}insert
iterator insert(iterator pos, const T& x)//指定位置插入
{
list_node* cur = pos.p_node; //用临时指针指向迭代器位置的节点
list_node* prev = cur->prev; //用临时指针指向该节点的下一个节点
list_node* newnode = new list_node(x); //构造新节点
prev->next = newnode; //改变指向
newnode->next = cur;
cur->prev = newnode;
newnode->prev = prev;
return newnode; //返回新节点的迭代器
}代码思路如下图
erase
iterator erase(iterator pos)//指定位置删除
{
assert(pos != end()); //不能删哨兵位
list_node* cur = pos.p_node; //用临时指针指向前中后三个节点
list_node* prev = cur->prev;
list_node* next = cur->next;
prev->next = next; //改变指向
next->prev = prev;
delete cur;//删除该节点
return next; //返回下一个位置的节点的迭代器
}赋值重载
现在写法
void swap(list<T>& lt)
{
std::swap(head_node, lt.head_node);
}
list<T>& operator=(list<T> lt)
{
swap(lt);
return *this;
}其他接口
void push_back(const T& x)
{
insert(end(), x);
}
void push_front(const T& x)
{
insert(begin(), x);
}
void pop_back()
{
erase(--end());
}
void pop_front()
{
erase(begin());
}本篇内容到此结束啦



![[力扣]——387.字符串中的第一个唯一字符](https://img-blog.csdnimg.cn/direct/9121aa197197402cb95c3cb53b9afab4.png)